Arduino Line Follower w/ collision detection
Final Product
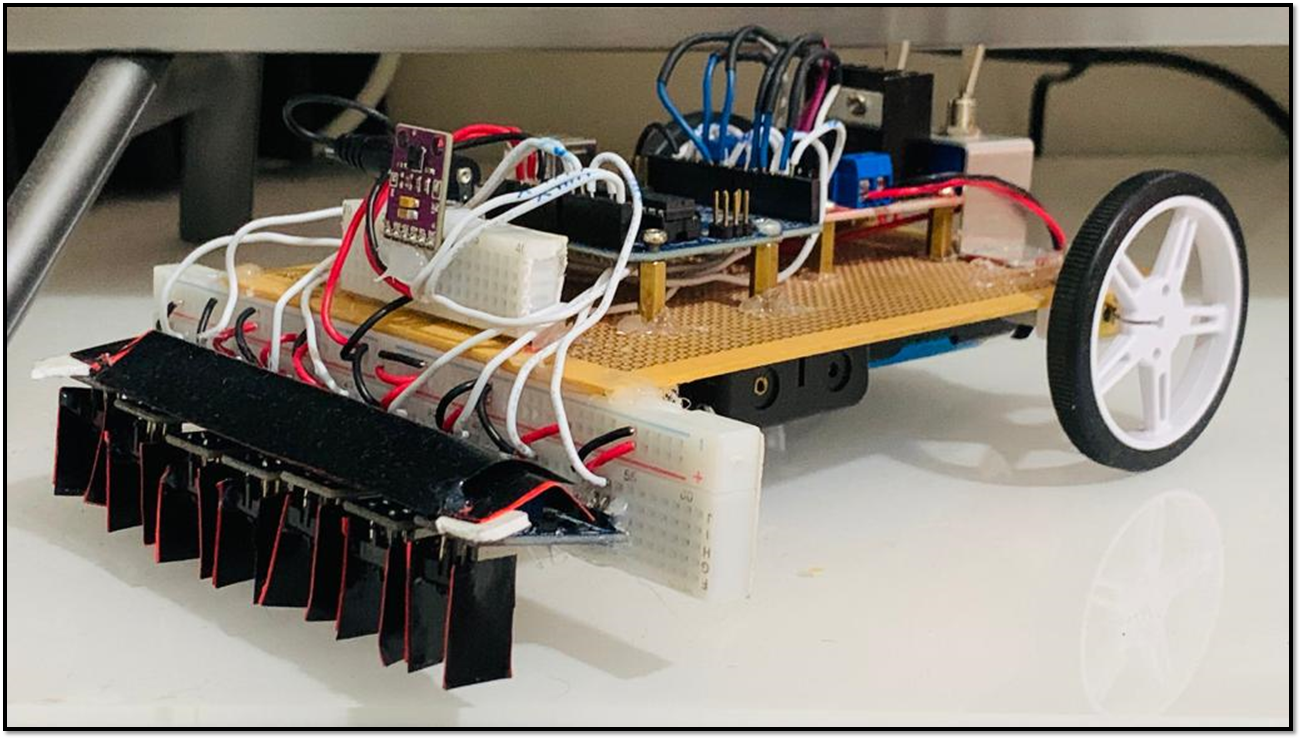
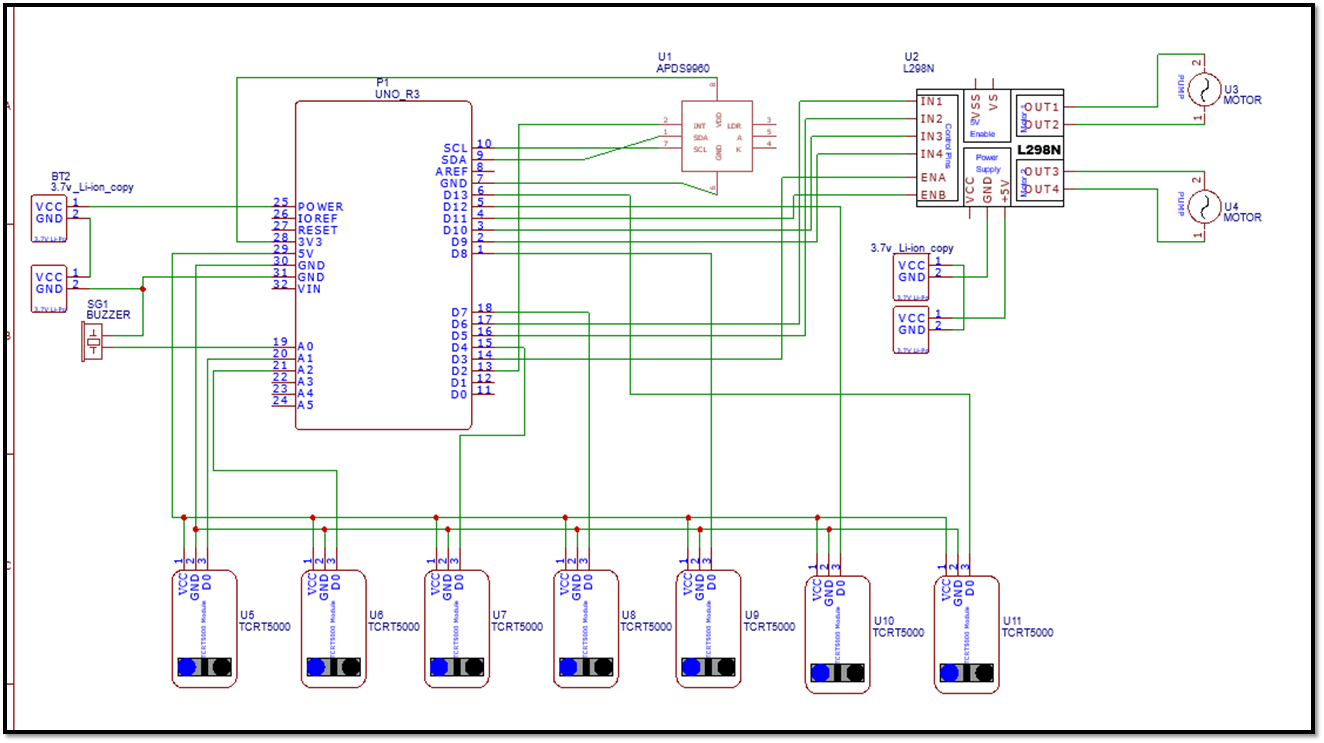
Hardware
- 1xArduino Uno 3
- 7xTCRT5000 IR Track Sensor (digital)
- 2xDC HP 590RPM 6V 50:1 70mA
- 1xAPDS-9960 Sensor
- 1xMotor Driver L298N
- 2xMotor Holder
- 4x3.7V Battery
- 2xWheels 60x8 Radius 30mm
- 1xBuzzer
- 1xSolderable Breadboard
{kind=link}
{kind=link}
Software Used: IDE: Arduino Pro 2.0 Schematics: Fritzing Code Version Control: Github
Lab Test Results: Speed: optimal ~100[cm/sec] , minimum – 50[cm/sec] , maximum - 350[cm/sec]
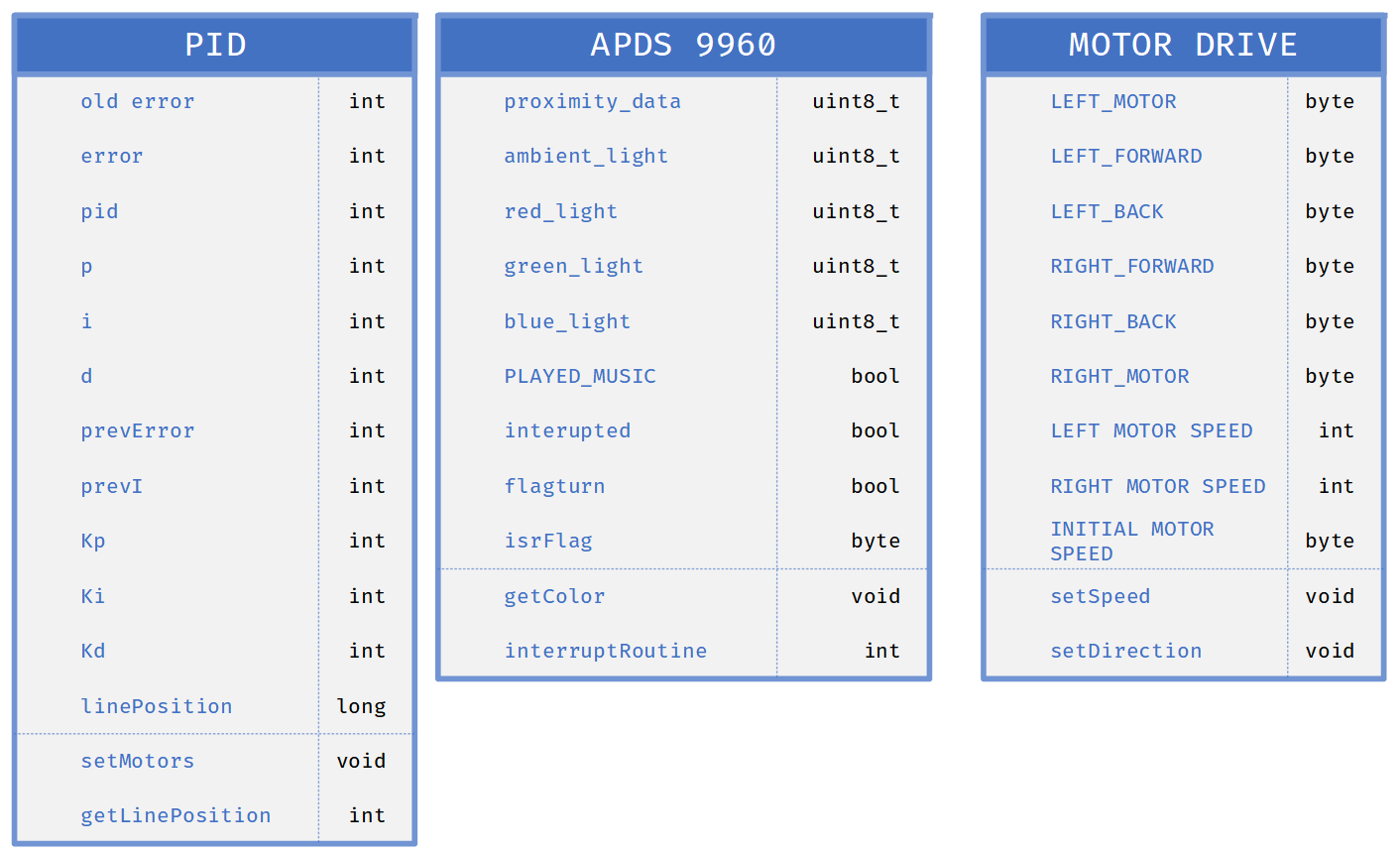
UML
Simplfied Algorithem
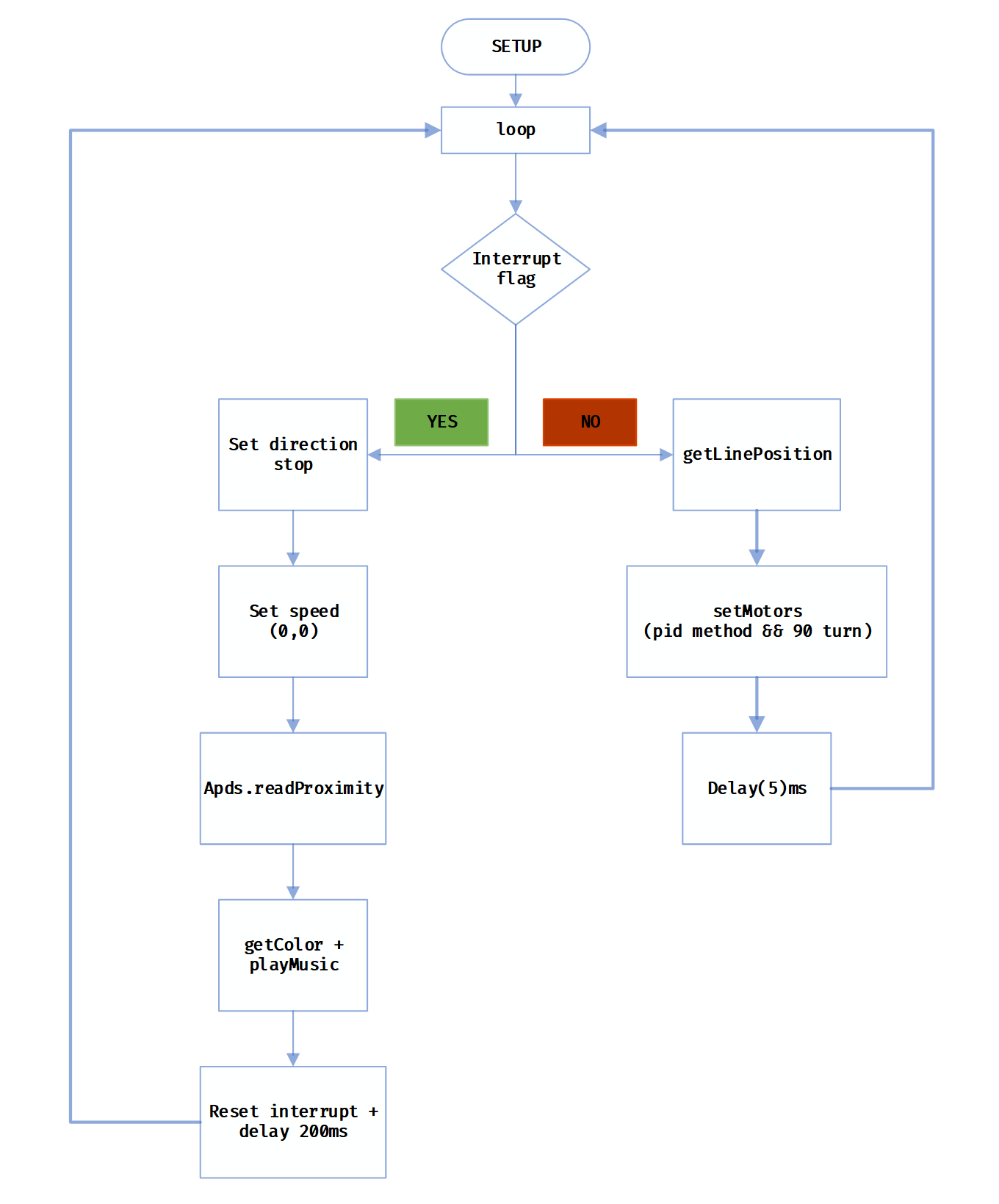
Basic Flow Chart
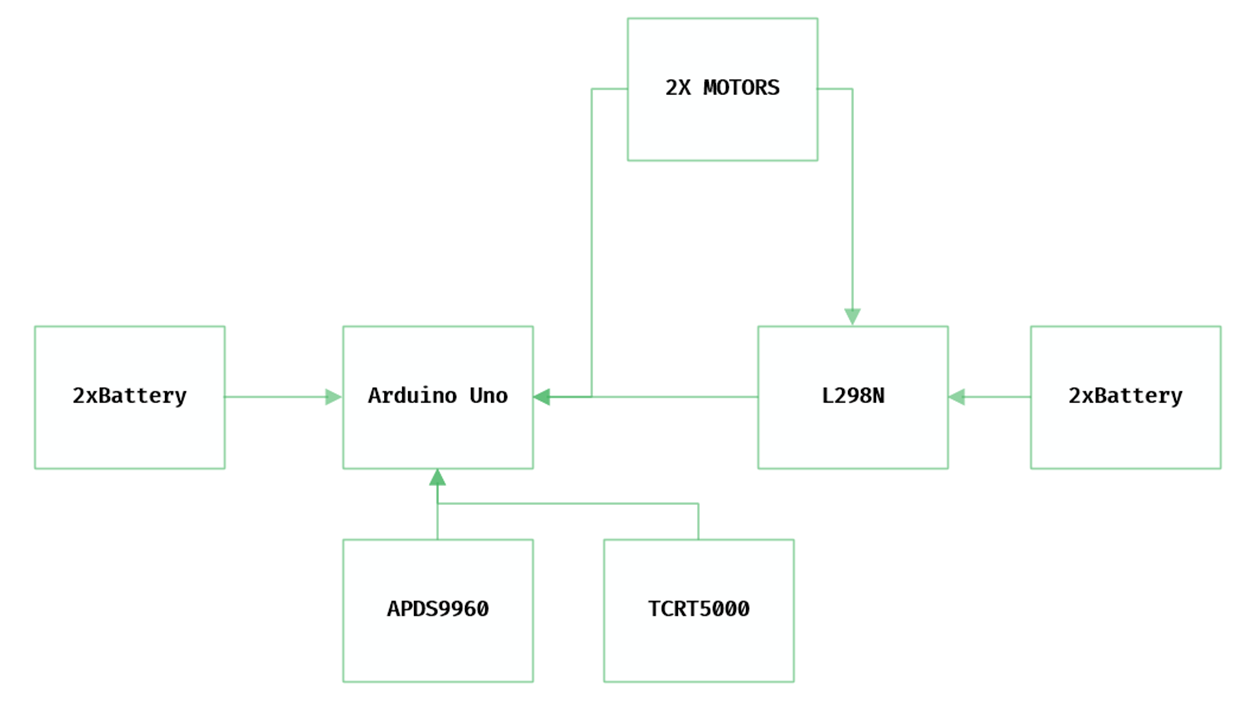
Circuit
Thanks for reading 😋